构建从数据采集、仿真训练到模型部署的完整技术闭环
融合视觉、触觉、力觉等多传感器数据,构建对物理环境的全面理解。支持3D点云、RGB-D、触觉反馈等模态同步处理。
基于物理引擎的高保真仿真环境,支持百万级并行训练。Domain Randomization技术确保模型在真实场景中的泛化能力。
从感知到动作的端到端学习框架,支持抓取、导航、操作等复杂任务。结合大语言模型实现自然语言指令理解。
提供多种高效的示教数据获取方案
通过VR头显、手柄控制器等设备进行远程操控,采集高质量的人类示教数据。支持低延迟传输、力反馈交互,实现真实触感的远程操作体验。
基于UMI(Universal Manipulation Interface)框架的通用机器人操控方案。通过低成本采集设备高效获取示教数据,支持跨机器人平台迁移。
为具身智能提供高质量数据燃料
UR、Franka、Kinova等主流硬件支持
家居、工业、商超等数字孪生环境
6D位姿、语义分割等专业标注
全国多地数据采集中心
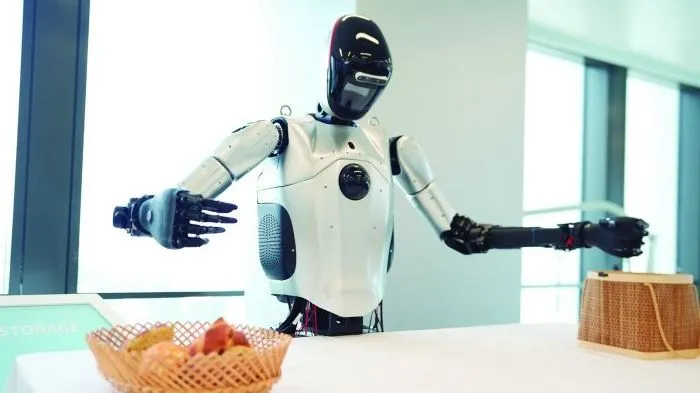
真实场景下的具身智能应用展示
精准识别与抓取透明/反光容器
稳定抓持与精准物体转移
高效识别与自动包裹分类处理